自动驾驶的基石 高精地图与计算机软硬件的协同开发
自动驾驶技术正以前所未有的速度重塑未来交通格局。在这项复杂而精密的系统工程中,高精地图技术与计算机软硬件技术扮演着不可或缺的核心角色,三者共同构成了自动驾驶汽车感知、决策与控制的“大脑”与“神经”。
一、高精地图:自动驾驶的“超视距感官”
高精地图是区别于传统导航地图的精密数据集合,其精度可达厘米级,包含远超人类认知范围的详尽静态信息。它不仅是自动驾驶的“路线图”,更是其感知系统的重要延伸和先验知识库。
- 核心技术构成:
- 数据采集:依赖配备激光雷达(LiDAR)、高精度全球导航卫星系统(GNSS)、惯性测量单元(IMU)及全景相机的专业采集车进行海量数据收集。
- 要素提取与矢量化:通过点云处理、计算机视觉与深度学习算法,从原始数据中自动识别、分类并精确提取车道线、交通标志、路沿、护栏、交通灯等关键要素,并将其转化为结构化的矢量数据。
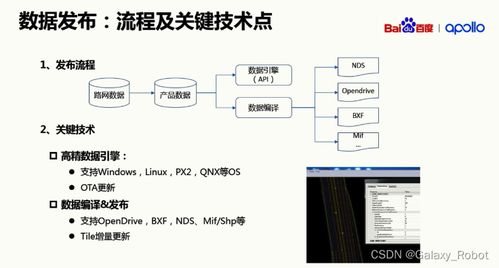
- 建模与融合:构建包含车道级拓扑连接关系、坡度曲率、交通规则(如限速、转向限制)的复杂道路模型,并与实时动态信息层(如交通流、临时施工)相融合。
- 核心功能价值:
- 定位增强:作为绝对参考基准,结合车载传感器(GNSS、IMU、轮速计)和特征匹配算法,实现稳定、鲁棒的厘米级高精度定位,尤其在隧道、城市峡谷等卫星信号不佳区域至关重要。
- 感知冗余与预见性规划:提供车辆传感器视野之外的先验信息(如前方弯道曲率、隐藏路口),帮助系统提前规划最优路径和驾驶策略,并作为感知结果的校验标准,提升系统安全冗余度。
- 安全与合规:精确的道路规则信息是车辆遵守交通法规、实现安全驾驶的基础。
二、计算机硬件:算力与可靠性的物理基石
自动驾驶对算力的需求呈指数级增长,同时要求硬件在严苛环境下具备车规级的高可靠性与低功耗。
- 核心硬件平台:
- 高性能计算单元(域控制器):作为车辆的“中央大脑”,集成多颗高性能系统级芯片(SoC),如英伟达Orin、高通Ride、华为MDC等,负责处理融合感知、预测、规划与控制等所有核心算法,需满足ASIL-D(汽车安全完整性等级最高级)的功能安全要求。
- 异构计算架构:融合CPU(通用处理)、GPU(并行计算,擅长图像处理与深度学习)、NPU/ASIC(神经网络专用处理器,高效执行AI推理)以及FPGA(可编程,灵活性高)等,针对不同任务优化,实现能效最大化。
- 高带宽与低延迟互联:依赖PCIe、以太网(如TSN时间敏感网络)等高速总线,确保传感器数据、计算单元与执行器之间的海量数据实时、可靠传输。
- 硬件挑战:如何在有限的物理空间、散热条件和电源预算下,提供持续、稳定且强大的算力,是硬件开发的核心挑战。硬件必须通过严格的振动、温度、电磁兼容性等车规认证。
三、计算机软件:驱动智能的灵魂
软件是硬件能力的释放者,是将数据转化为智能驾驶行为的核心。自动驾驶软件栈呈现高度模块化与复杂化的特点。
- 核心技术栈分层:
- 操作系统与中间件:采用实时操作系统(RTOS,如QNX)或基于Linux的定制化OS,确保关键任务的确定性与时效性。中间件(如ROS 2、AUTOSAR Adaptive)提供模块间通信、资源管理和服务发现等基础框架,是实现软硬件解耦、加速开发的关键。
- 感知算法:基于深度学习(卷积神经网络CNN、Transformer等)的计算机视觉算法处理摄像头数据,进行目标检测、识别与跟踪;点云处理算法解析激光雷达数据,进行3D物体检测与场景分割;多传感器融合算法(如卡尔曼滤波、贝叶斯网络)将不同来源的数据在时空上对齐、互补,形成统一、可靠的环境感知结果。
- 定位与高精地图引擎:负责高精地图数据的加载、解析、局部检索,并实现基于地图特征的定位算法。
- 预测与决策规划:基于感知和地图信息,预测交通参与者(车辆、行人)的未来轨迹,并运用规则与强化学习相结合的方法,在毫秒级内做出符合交规、安全且舒适的驾驶决策(如换道、跟车、避让),生成平滑、可行的轨迹。
- 控制与仿真:精准的车辆动力学模型和控制算法(如模型预测控制MPC)将规划轨迹转化为油门、刹车、转向的精确控制指令。大规模云端仿真平台则用于在虚拟环境中进行海量场景测试与算法迭代,是确保安全、降低成本的关键工具。
四、技术协同:三位一体的融合发展
自动驾驶的成功绝非单一技术的突破,而是高精地图、硬件与软件三者深度协同的结果。
- 软件定义地图:地图的生产、更新(如通过众包数据)越来越依赖AI软件算法,而地图的格式、精度和内容又直接决定了定位、规划等软件模块的设计与效能。
- 软硬件协同设计:算法开发者需充分理解硬件特性(如算力、内存带宽),进行模型剪枝、量化、编译优化;芯片设计者亦需洞察主流算法需求,设计专用的计算单元(如张量核心)。
- 数据闭环驱动迭代:车辆运行产生的海量数据,经过脱敏、标注后,用于持续训练和优化感知、预测模型,同时反馈至高精地图的更新环节,形成“数据采集-模型训练-地图更新-车辆部署-新数据采集”的闭环,驱动整个系统不断进化。
随着5G/V2X车路协同的深化,高精地图将演变为动态、众包、轻量化的“高精动态地图”;计算硬件将向中央计算+区域控制的架构演进,算力持续飙升;软件算法则朝着端到端AI、大模型驱动的方向探索。唯有这三驾马车并驾齐驱、深度融合,才能最终驶向安全、高效、普惠的完全自动驾驶时代。
如若转载,请注明出处:http://www.iceftech.com/product/84.html
更新时间:2026-08-02 07:41:15